- آیا می توانم خانه خود را بفروشم یا خانه خود را تغییر دهم اگر دارای آزادسازی سهام باشم؟
- تامین مالی در سطح UnitedHealthcare و بودجه جایگزین All Savers
- پشتیبانی و مقاومت MACD
- شما نیز می توانید از املاک و مستغلات تجاری در کادر بهره مند شوید. ما به افراد امکان دسترسی به سرمایه گذاری در کنار موسسات را بر روی پلتفرم با کاربرد آسان می دهیم. تیم سرمایه گذاری با تجربه ما از علم داده های اختصاصی استفاده می کند تا به بازده های قانع کنن
- هزینه سرمایه
- 10 بهترین مدرک برای مدیران صندوق پرچین
- کاوش در Geodynamo
- تجارت الکترونیک
- دنباله دار Holding AG (Cotne)
- چرا ورزشکاران باید تمرینات اصلاحی را امتحان کنند

آخرین مطالب
امکانات وب


این فیلتر بسیار ساده برای سرکوب خطاهای اندازه گیری تصادفی (تصادفی) استفاده می شود. این با نیازهای کم CPU (استفاده از حافظه و زمان محاسبات) مشخص می شود. ضرر تأخیر در سیگنال اندازه گیری و یک معادله فیلتر پیچیده است. برای محاسبه دقیق ریاضی ، مطمئناً بهتر است از سایر فیلترهای دیجیتال استفاده کنید.
هنگام اندازه گیری سیگنال های فیزیکی ، خطاهای تصادفی می تواند رخ دهد که به طور گسترده بر یک مدار کنترل تأثیر می گذارد یا می تواند به طور دروغین یک مقدار متوسط را تحریف کند. علت این خطاهای اندازه گیری گسترده است ، اما "گسل های خط" (به عنوان مثال اتصال کوتاه به زمین از یک خط سیگنال) و "خطاهای بیت" بیشتر اتفاق می افتد. مشترک با این خطاها ، تغییر سیگنال کوتاه قوی رخ می دهد.
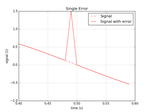
تصویر فوق آشفتگی را نشان می دهد: افزایش بسیار شیب دار به یک مقدار اندازه گیری بالا. یک کنترلر کلاسیک PID مطمئناً به این امر واکنش نشان می دهد.
راه حل این است که یک حلقه کنترل زیر را "پایدار" در برابر چنین خطاهایی ایجاد کنید - اما این باعث می شود واکنش کنترلر به طور قابل توجهی کاهش یابد.
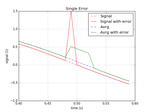
به عنوان یک راه حل ساده دیگر ، سیگنال را می توان با کمک "میانگین در حال حرکت" درمان کرد - خطا با استفاده از میانگین "کاهش می یابد". سیگنال فیلتر شده به سیگنال اصلی به تأخیر می افتد ، بنابراین زمان اجرای گروه مسیر کنترل را افزایش می دهد. این باید هنگام طراحی حلقه کنترل در نظر گرفته شود.
اما حتی با این اقدام ، هنوز هم با افزایش شدید ، ارزش قابل توجهی بالا وجود دارد.
در صورتی که مقادیر مورد استفاده برای میانگین استفاده می شوند ، قبل از میانگین محاسبه مقدار برای حداقل و حداکثر می توان پیشرفت کرد. مقادیر برای محاسبه مقدار میانگین استفاده نمی شوند.
شکل زیر این را نشان می دهد: منحنی "میانگین هوشمند" منحنی روش انتخاب شده را نشان می دهد.
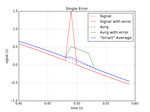
تأثیر اختلال بدون وخیم تر شدن بیشتر زمان در حال اجرا گروه به وضوح به حداقل می رسد. همچنین "خطاهای مضاعف" معمولی ناشی از "چرخش عقب" سیگنال فیلتر می شود.
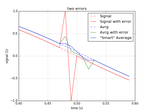
سیستم فیزیکی برای تفسیر فیلتر مورد بحث مهم است. آیا فقط می توان "Outliers" مثبت را رخ داد؟یک اختلال معمولی چقدر است؟این اطلاعات تعریف می کند که مقادیر "حداکثر/حداقل" فیلتر می شوند و آیا فقط "مثبت" ، "منفی" یا هر دو مقدار باید فیلتر شوند.
مثال
کد نمونه زیر اجرای احتمالی این فیلتر را نشان می دهد.
/************************************************************************/ / * توابع یاور */ /************************************************************************/void data_filter_find_int_min_max(int16_t*data_array,uint16_t array_size,uint16_t*Min__Position,uint16_t*max_position) int16_t min_val,max_val;uint16_t i;uint16_t min_pos,max_pos;min_val=INT16_MAX;max_val=INT16_MIN;min_pos= 0;max_pos=آرایه_اندازه-1; /* ابتدا برای تعیین مقادیر حداکثر/دقیقه اجرا شود */ برای (i=0; iآرایه_اندازه; i++) if (data_array[i]>max_val) max_val=آرایه_داده[i];max_pos= i; > دیگر if (data_array[i]min_val) min_val=آرایه_داده[i];min_pos= i; > > *موقعیت_min=min_pos; *حداکثر_موقعیت=max_pos; > /************************************************************************/ /* حذف فیلتر میانگین مین-مکس ساده */ /************************************************************************/int16_t data_filter_mima_array_int(int16_t*data_array,uint16_t array_size) جمع int32_t;uint16_t i,min_pos,max_pos;مجموع= 0;data_filter_find_int_min_max(data_array,آرایه_اندازه, &min_pos, &max_pos); برای (i=0; iآرایه_اندازه; i++) if ((i!=max_pos) && (i!=min_pos)) مجموع+= (int32_t)(data_array[i]); > >مجموع/= (آرایه_اندازه-2); برگشت (int16_t)مجموع; >
در صورت داشتن هرگونه سوال، پیشنهاد یا بازخورد، لطفاً از طریق ایمیل با ما تماس بگیرید.
کتاب آموزش بورس...
ما را در سایت کتاب آموزش بورس دنبال می کنید
برچسب :
نویسنده : محسن زنجانچی
بازدید : 33
